Arduino se enfoca en acercar y facilitar el uso de la electrónica y programación de sistemas embebidos en proyectos multidisciplinarios.Toda la plataforma, incluyendo sus componentes de hardware (esquemáticos) y Software, son liberados con licencia de código abierto que permite libertad de acceso a ellos. El hardware consiste en una placa de circuito impreso con un microcontrolador, usualmente Atmel AVR, puertos digitales y analógicos de entrada/salida, los cuales pueden conectarse a placas de expansión (shields), que amplían los funcionamientos de la placa Arduino. Asimismo, posee un puerto de conexión USB desde donde se puede alimentar la placa y establecer comunicación con el computador.
Microcontrolador AVR® de 8 bits de alto rendimiento y baja potencia
Arquitectura RISC avanzada: *131 potentes instrucciones - La mayoría de ejecución de ciclo de reloj único, *32 x 8 Registros de trabajo de propósito general, *Operación completamente estática, *Hasta 20 MIPS de rendimiento a 20 MHz, *Multiplicador de 2 ciclos en chip
Segmentos de memoria no volátil de alta resistencia: *4/8/16 / 32K Bytes de la memoria del programa Flash autoprogramable dentro del sistema, *256/512/512 / 1K Bytes EEPROM, *512 / 1K / 1K / 2K bytes SRAM internos, *Ciclos de escritura / borrado: 10,000 Flash / 100,000 EEPROM, *Retención de datos: 20 años a 85 ° C / 100 años a 25 ° C (1), *Sección de código de arranque opcional con bits de bloqueo independientes, *Programación en el sistema mediante el programa de arranque en chip, *Verdadera operación de lectura mientras se escribe, *Bloqueo de programación para seguridad de software.
Características periféricas: *Dos temporizadores / contadores de 8 bits con preescalador independiente y modo de comparación, *Un temporizador / contador de 16 bits con preescalador independiente, modo de comparación y captura, *Modo: *Contador en tiempo real con oscilador separado, *Seis canales PWM, *ADC de 8 canales y 10 bits en el paquete TQFP y QFN / MLF.
Medida de temperatura: *ADC de 10 canales de 10 bits en paquete PDIP, *Serie USART programable, *Interfaz serial SPI Master / Slave, *Interfaz serie de 2 hilos orientada a bytes (Philips I2C compatible), *Temporizador de vigilancia programable con oscilador separado en el chip, *Comparador analógico en el chip, *Interrumpir y despertar en el cambio de pin.
Funciones especiales del microcontrolador: *Reinicio de encendido y detección programable de apagado, *Oscilador calibrado interno, *Fuentes de interrupción externa e interna, *Seis modos de reposo: inactivo, reducción de ruido ADC, ahorro de energía, apagado, modo de espera, y Standby extendido
E / S y paquetes:*23 líneas de E / S programables, *PDIP de 28 pines, TQFP de 32 derivaciones, QFN / MLF de 28 almohadillas y QFN / MLF de 32 almohadillas
Arduino se enfoca en acercar y facilitar el uso de la electrónica y programación de sistemas embebidos en proyectos multidisciplinarios.Toda la plataforma, incluyendo sus componentes de hardware (esquemáticos) y Software, son liberados con licencia de código abierto que permite libertad de acceso a ellos. El hardware consiste en una placa de circuito impreso con un microcontrolador, usualmente Atmel AVR, puertos digitales y analógicos de entrada/salida, los cuales pueden conectarse a placas de expansión (shields), que amplían los funcionamientos de la placa Arduino. Asimismo, posee un puerto de conexión USB desde donde se puede alimentar la placa y establecer comunicación con el computador.
Microcontrolador AVR® de 8 bits de alto rendimiento y baja potencia
Arquitectura RISC avanzada: *131 potentes instrucciones - La mayoría de ejecución de ciclo de reloj único, *32 x 8 Registros de trabajo de propósito general, *Operación completamente estática, *Hasta 20 MIPS de rendimiento a 20 MHz, *Multiplicador de 2 ciclos en chip
Segmentos de memoria no volátil de alta resistencia: *4/8/16 / 32K Bytes de la memoria del programa Flash autoprogramable dentro del sistema, *256/512/512 / 1K Bytes EEPROM, *512 / 1K / 1K / 2K bytes SRAM internos, *Ciclos de escritura / borrado: 10,000 Flash / 100,000 EEPROM, *Retención de datos: 20 años a 85 ° C / 100 años a 25 ° C (1), *Sección de código de arranque opcional con bits de bloqueo independientes, *Programación en el sistema mediante el programa de arranque en chip, *Verdadera operación de lectura mientras se escribe, *Bloqueo de programación para seguridad de software.
Características periféricas: *Dos temporizadores / contadores de 8 bits con preescalador independiente y modo de comparación, *Un temporizador / contador de 16 bits con preescalador independiente, modo de comparación y captura, *Modo: *Contador en tiempo real con oscilador separado, *Seis canales PWM, *ADC de 8 canales y 10 bits en el paquete TQFP y QFN / MLF.
Medida de temperatura: *ADC de 10 canales de 10 bits en paquete PDIP, *Serie USART programable, *Interfaz serial SPI Master / Slave, *Interfaz serie de 2 hilos orientada a bytes (Philips I2C compatible), *Temporizador de vigilancia programable con oscilador separado en el chip, *Comparador analógico en el chip, *Interrumpir y despertar en el cambio de pin.
Funciones especiales del microcontrolador: *Reinicio de encendido y detección programable de apagado, *Oscilador calibrado interno, *Fuentes de interrupción externa e interna, *Seis modos de reposo: inactivo, reducción de ruido ADC, ahorro de energía, apagado, modo de espera, y Standby extendido
E / S y paquetes:*23 líneas de E / S programables, *PDIP de 28 pines, TQFP de 32 derivaciones, QFN / MLF de 28 almohadillas y QFN / MLF de 32 almohadillas
3.3 Semana 03: PASTILLERO Código para el pastillero: /* Programa PastilleroV10.ino Controla la operación del pastillero. Contiene, además de las funciones setup() y loop(), las funciones ConversionHminMs(), ConversionMsHmin(), ActivaMotor(), Alarma(), Despliegue(), DespliegueHoraToma() e Interruptor(). */ // Variables Alarma int pinBuzzer = 15; int pinLed1 = 16; int pinLed2 = 17; int pinBoton = 2; boolean banderaAlarma = HIGH; int rep; int numRep = 10; int tiempoEnc = 600; int tiempoApag = 400; int tiempoEspera = 9900; // Variables ActivaMotor int pinIntLamina = 5; int pinIN1 = 7; int pinIN2 = 8; int pinPWM = 9; boolean estadoIntLamina; int valorPWM = 230; long tiempoActivacion[5]; int toma = 0; // Variables Despliegue long tiempoMs; long tiempoBase; long tiempoActual; long hora; long minuto; long horaActual; long minActual; int tiempoRet = 19000; // Se incluye el código de la biblioteca del LCD #include <LiquidCrystal.h> // Inicializa la biblioteca con el número de los pines LiquidCrystal lcd(4, 6, 11, 12, 13, 14); // Función setup void setup() { // Hora de reinicio hora = 8; minuto = 39; // Cálculo tiempo base ConversionHminMs(); tiempoBase = tiempoMs; // Configuración del número de columnas y renglones del LCD lcd.begin(16,2); // Configuración terminales buzzer, led y botón alarma pinMode(pinBuzzer, OUTPUT); pinMode(pinLed1, OUTPUT); pinMode(pinLed2, OUTPUT); pinMode(pinBoton, INPUT); attachInterrupt(0, Interruptor, RISING); // Configuración terminales del puente H y del interruptor pinMode(pinIN1, OUTPUT); pinMode(pinIN2, OUTPUT); pinMode(pinIntLamina, INPUT); // Cálculo tiempos de activación del motor // Hora de la primera toma hora = 9; minuto = 00; ConversionHminMs(); tiempoActivacion[0] = tiempoMs; // Hora de la segunda toma hora = 12; minuto = 30; ConversionHminMs(); tiempoActivacion[1] = tiempoMs; // Hora de la tercera toma hora = 15; minuto = 00; ConversionHminMs(); tiempoActivacion[2] = tiempoMs; // Hora de la cuarta toma hora = 18; minuto = 45; ConversionHminMs(); tiempoActivacion[3] = tiempoMs; // En caso de que haya más tomas, agregarlas a continuación: // Hora final hora = 23; minuto = 59; ConversionHminMs(); tiempoActivacion[4] = tiempoMs; } // Función loop void loop() { // Envío señales iniciales al puente H: motor detenido digitalWrite(pinIN1, 0); digitalWrite(pinIN2, 0); analogWrite(pinPWM, valorPWM); Despliegue(); delay(tiempoRet); /* Mientras el tiempoActual sea menor que el tiempoActivacion[toma] + tiempoBase, sólo despliega la hora */ do { Despliegue(); delay(tiempoRet); tiempoActual = millis() + tiempoBase; } while(tiempoActual < tiempoActivacion[toma]); /* Cuando el tiempoActual es mayor que el tiempoActivacion[toma] se sale de la estructura do–while, activa el motor, despliega la hora de toma y enciende la alarma */ ActivaMotor(); banderaAlarma = HIGH; do { // Despliegue de la hora de toma DespliegueHoraToma(); Alarma(); } while(banderaAlarma == HIGH); /* La alarma se apagará cuando se oprima el botón de apagado, el cual hará que la variable banderaAlarma tome el valor LOW, de manera que se saldrá de la estructura do–while anterior */ // Borra lcd lcd.clear(); toma++; } /* Función ConversionHminMs Convierte el tiempo en horas y minutos a milisegundos */ void ConversionHminMs() { minuto = minuto + hora*60; tiempoMs = minuto*60000; } /* Función ConversionMsHmin Convierte el tiempo en milisegundos a horas y minutos */ void ConversionMsHmin() { horaActual = tiempoActual/60/60000; minActual = tiempoActual/60000 - horaActual*60; } /* Función Despliegue Despliega en un LCD la hora, con formato hora:minutos 24 h * Pin RS del LCD al pin 4 * Pin E del LCD al pin 6 * Pin D4 del LCD al pin 11 * Pin D5 del LCD al pin 12 * Pin D6 del LCD al pin 13 * Pin D7 del LCD al pin 14 * Pin R/W del LCD a tierra */ void Despliegue() { // Calcula el tiempoActual con respecto al tiempoBase tiempoActual = millis() + tiempoBase; // Conversión del tiempoActual a horas:munutos ConversionMsHmin(); // Se inicializa el LCD lcd.begin(16,2); // Se coloca el cursor en el origen lcd.setCursor(0,0); // Limpia el primer renglón lcd.print(" "); // Se coloca el cursor en el origen lcd.setCursor(0,0); // Escribe el letrero Hora lcd.print("Hora "); // Escribe horas:minutos lcd.print(horaActual); lcd.print(":"); lcd.print(minActual); } /* Función Activa Motor Controla el motor de CD del pastillero, con base en la señal de un interruptor de lámina activa alta */ void ActivaMotor() { do { digitalWrite(pinIN1, 1); estadoIntLamina = digitalRead(pinIntLamina); } while(estadoIntLamina == HIGH); delay(200); do { digitalWrite(pinIN1, 1); estadoIntLamina = digitalRead(pinIntLamina); } while(estadoIntLamina == LOW); digitalWrite(pinIN1, 0); } /* Función Alarma Hace sonar intermitentemente un buzzer, y al mismo tiempo prende un led intermitentemente, hasta que se oprime el botón de apagado de la alarma */ void Alarma() { for (rep = 0; rep < numRep; rep++) { digitalWrite(pinBuzzer, HIGH); digitalWrite(pinLed1, HIGH); digitalWrite(pinLed2, HIGH); delay(tiempoEnc); digitalWrite(pinBuzzer, LOW); digitalWrite(pinLed1, LOW); digitalWrite(pinLed2, LOW); delay(tiempoApag); } delay(tiempoEspera); } /* Función Interruptor Rutina de servicio de interrupción */ void Interruptor() { banderaAlarma = LOW; } /* Función DespliegueHoraToma Despliega en el segundo renglón del LCD la hora de la toma de las pastillas, indicando también a qué toma corresponde */ void DespliegueHoraToma() { Despliegue(); // Calcula el tiempo de la toma con respecto al tiempoBase tiempoActual = tiempoActivacion[toma]; // Conversión del tiempoActual a horas:munutos ConversionMsHmin(); // Se coloca el cursor en el origen del segundo renglón lcd.setCursor(0,1); // Limpia el segundo renglón lcd.print(" "); // Se coloca el cursor en el origen lcd.setCursor(0,1); // Escribe el número de la toma lcd.print(toma+1); // Escribe el letrero "a toma " lcd.print("a toma "); // Escribe horas:minutos lcd.print(horaActual); lcd.print(":"); lcd.print(minActual); }
Programar e implementar con controlador PIC letrero de leds giratorio o persistence of vision (POV).
2. OBJETIVOS ESPECÍFICOS:
Desarrollar este proyecto para conocer mas sobre la programación en lenguaje "c" ademas de implementarlo físicamente con un PIC determinado que cumpla con nuestras necesidades.
Realizar en el tiempo de 1 mes para, escribir la programación de este programa y implementar físicamente la tarjeta.
Resolver todos los problemas que se nos presenten, por que “Cada problema lleva en sí mismo la semilla de su propia solución”.
Desarrollar el letrero de led's giratorio para aplicar en el tema de marketing y publicidad.
3. JUSTIFICACIÓN:
Este proyecto tiene un impacto muy bueno en la publicidad ya que es algo novedoso en cuanto a tecnología y ademas de llamativo para un usuario así logrando la atención de un cliente y mostrarle el producto que tengamos.
El proyecto no es tan complejo de implementar ni tan costos por lo cual es ideal para el publico en general lo cual económicamente es muy bueno.
El POV (Persistence Of Vision) es un fenómeno visual descubierto por el científico belga Joseph Plateau que demuestra cómo una imagen permanece en la retina humana una décima de segundo antes de desaparecer completamente. Esto permite que veamos la realidad como una secuencia de imágenes que el cerebro "enlaza" como una sola imagen visual móvil y continua.
4. PIC 16F628A:
El microcontrolador es un circuito o dispositivo programable capaz de realizar diferentes actividades que requieran del procesamiento de datos digitales y del control y comunicación digital de diferentes dispositivos. El PIC 16f628a es un microcontrolador de 8 bit, posee una arquitectura RISC avanzada así como un juego reducido de 35 instrucciones. Este microcontrolador es el remplazo del obsoleto PIC16F84a, los pines del 16f628a so compatibles con el 16f84a, así que se podrán actualizar proyectos.
Modos de direccionamiento directos, indirectos y relativo.
35 simples instrucciones de palabras.
Todas las instrucciones de ciclo único, excepto las de salto.
2. Características especiales del microcontrolador:
Opciones de oscilador interno y externo.
Precisión de fabrica de oscilador interno de 4 MHz calibrada a ±1%.
Oscilador de 48 KHz de bajo consumo interno.
Modo de ahorro de energía en modo sueño.
Resistencia programable pul-ups del PORTB.
Multiplexado del pin reset/entrada -pin.
Temporizador Watchdog con oscilador independiente para un funcionamiento fiable.
Baja tensión de programación In-Circuit Serial ( a través de dos pines).
Protección de código programable.
Brown-out rset.
Power-on reset.
Power-up Timer y el oscilador de puesta en marcha del temporizador.
Amplio rango de funcionamiento de tensión (2.0- 5.5V).
Industrial y amplia gama de temperaturas extendidas.
Alta durabilidad de la memoria FLASH/EEPROM: *100 000 ciclos de escritura FLASH. * 1 000 000 ciclos de escritura EEPROM. * 40 años de retención de datos.
Doble velocidad seleccionable del oscilador interno: * Tiempo de ejecución seleccionable entre 4MHz y de 48KHz. * 4μs despertar de un sueño, 3.0V, Típico.
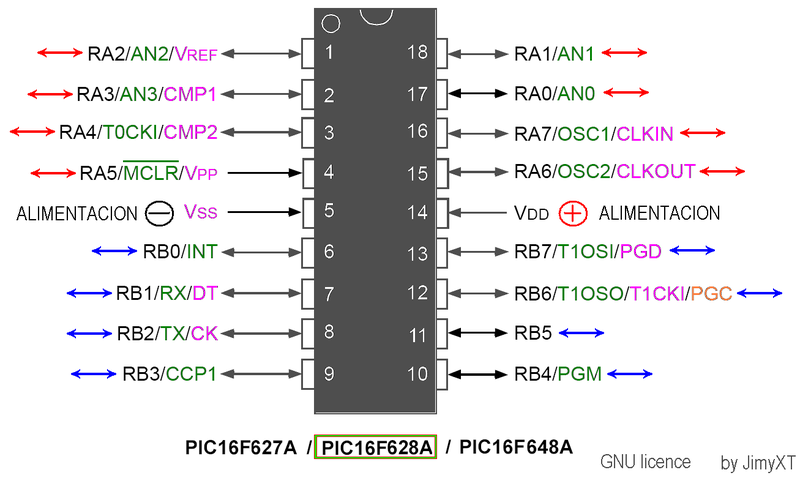
Distribución del pines del PIC 16F628A
Los pines I/O (Input/Output) están organizados en 5 puertos:
Puerto A: 8 pines
Puerto B: 8 pines
Pin VSS and Pin VDD
5. DIAGRAMA INTERNO DEL PIC 16F628A:
Diagrama interno PIC16F628A
6. FLUJOGRAMA DEL SISTEMA:
7. ESTRUCTURA DEL SISTEMA:
8. CÓDIGO EN C COMPILLER.
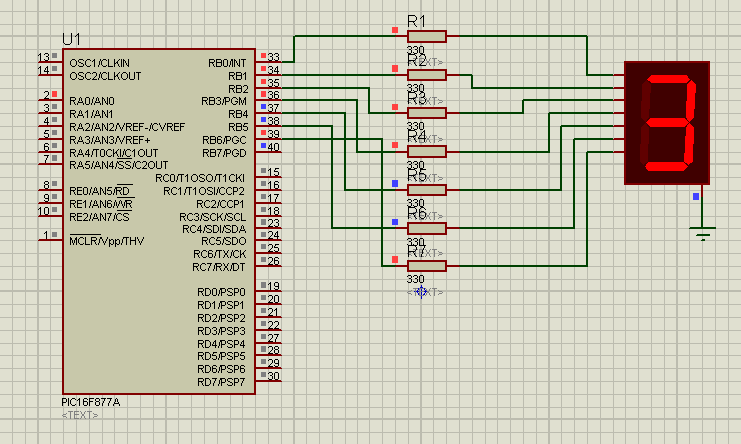
PRUEBA 01: Hemos usado el PIC16F877A-Puerto "B" y el mensaje es "HOLA". En esta prueba quisimos ver si la idea que teníamos podría funcionar. La simulación nos salio perfectamente bien, pero nos dimos cuenta que era un PIC demasiado grande para nuestro proyecto. Usamos el clock de 20MHz referencia de datasheet. Trabajamos con mili-segundos para que sea perceptible por la vista.
PRUEBA02: Cambiamos el PIC16F877A por uno con menos instrucciones, escogimos el 17F84A. Los resultados salieron satisfactoriamente bien pero el PIC ya era obsoleto y por recomendación del profesor cambiamos a otro PIC. El tiempo de trabajo lo reducimos un poco más pero sigue en el rango de mili-segundos. Modificamos el clock de 20MHz a 4MHz, para ellos nos guiamos del datasheet. El mensaje a aparecer es "UCONTROLADORES" en referencia al curso.
#include <16f84a.h>
#fuses hs,nowdt
#use delay(clock=4M)
void apagar()
{
output_b(0b00000000);
}
void encender()
{
output_b(0b11111111);
}
void letraU()
{
output_b(0b11111111);
delay_ms(100);
output_b(0b10000000);
delay_ms(300);
output_b(0b11111111);
delay_ms(100);
apagar();
delay_ms(100);
}
void letraC()
{
output_b(0b11111111);
delay_ms(100);
output_b(0b10000001);
delay_ms(400);
apagar();
delay_ms(100);
}
void letraO()
{
output_b(0b11111111);
delay_ms(100);
output_b(0b10000001);
delay_ms(300);
output_b(0b11111111);
delay_ms(100);
apagar();
delay_ms(100);
}
void letraN()
{
output_b(0b11111111);
delay_ms(100);
output_b(0b00001111);
delay_ms(100);
output_b(0b00111000);
delay_ms(100);
output_b(0b11100000);
delay_ms(100);
output_b(0b11111111);
delay_ms(100);
apagar();
}
void letraE()
{
output_b(0b11111111);
delay_ms(100);
output_b(0b10010001);
delay_ms(400);
apagar();
delay_ms(100);
}
void letraA()
{
output_b(0b11111111);
delay_ms(100);
output_b(0b00010001);
delay_ms(300);
output_b(0b11111111);
delay_ms(100);
apagar();
delay_ms(100);
}
void letraT()
{
output_b(0b00000001);
delay_ms(200);
output_b(0b11111111);
delay_ms(100);
output_b(0b000000001);
delay_ms(200);
apagar();
delay_ms(100);
}
void letraR()
{
output_b(0b11111111);
delay_ms(100);
output_b(0b00011001);
delay_ms(100);
output_b(0b00101001);
delay_ms(100);
output_b(0b01001001);
delay_ms(100);
output_b(0b10001111);
delay_ms(100);
apagar();
delay_ms(100);
}
void letraL()
{
output_b(0b11111111);
delay_ms(100);
output_b(0b10000000);
delay_ms(400);
apagar();
delay_ms(100);
}
void letraD()
{
output_b(0b11111111);
delay_ms(100);
output_b(0b10000001);
delay_ms(200);
output_b(0b01000010);
delay_ms(100);
output_b(0b00111100);
delay_ms(100);
apagar();
delay_ms(100);
}
void letraS()
{
output_b(0b10011111);
delay_ms(100);
output_b(0b10011001);
delay_ms(300);
output_b(0b11111001);
delay_ms(100);
apagar();
delay_ms(100);
}
void main()
{
set_tris_b(0b00000000);
output_b(0b00000000);
while(true)
{
letraU();//listo
letraC();//listo
letraO();//listo
letraN();//listo
letraT();//listo
letraR();//listo
letraO();//listo
letraL();//listo
letraA();//listo
letraD();//listo
letraO();//listo
letraR();//listo
letraE();//listo
letraS();//listo
delay_ms(3000);
}
}
Simulación ISIS
Características de carga
PRUEBA03: Finalmente decidimos trabajar con el PIC16F628A. el cual es el PIC reemplazo del 16F84A, nos facilito la conexión ya que tenían la misma configuración de entradas y salidas. Nuestro mensaje a aparecer es "UCONTROLADORES" en referencia al nombre del curso. Modificamos los mili-segundos a micra-segundos. Modificamos el clock de 20MHz a 4MHz, para ellos nos guiamos del datasheet.
Nuestro proyecto sirve de gran utilidad por su versátil de control y re-programación que se puede ajustar a diferentes necesidades.
Está de más resaltar la gran importancia y avance tecnológico que tiene hoy en día el lenguaje C al igual que los pic que salen al mercado y las grandes e interesantes cosas que podemos hacer con ellos.
Se diseñó y se implementó los leds giratorios que muestran el mensaje al usuario todo esto gracias al pic 16f628a.
Fue importante entender perfectamente el funcionamiento del 16f28a; al principio nuestro código no funcionaba pero gracias a la intervención del profesor y algunos cambios que hicimos en fuses; elprograma funciono correctamente.
Era importante determinar la velocidad de giro de nuestros led´s ya que solo a una velocidad específica el mensaje programado podría ser visualizado.
Finalmente se puede decir que este proyecto es factible y sencillo de armar, puesto que todos los dispositivos que intervienen en él, están disponibles en el mercado, aunque su información referente a su funcionamiento es poca se puede entender con ver vídeos sobre este.
Es necesario habilitar los display para poder mostrar el contador. En las cadenas de caracteres la primera variable siempre se la llamara con la posición de 0.
Podemos trabajar con valores enteros, hexadecimales, binarios para hacer nuestros programas en C Compiler.
Nuestro proyecto sirve de gran utilidad por su versátil control y reprogramación que se puede ajustar a diferentes necesidades
3.2 CONCLUSIONES
En este laboratorio aprendimos a usar la función for el cual funciona como un contador ya que posee de tres partes inicialización, condición e incremento, donde es necesario que se cumpla la condición para poder desarrollar dicho proceso.
Pudimos desarrollar un programa con el bucle for que nos permitió diseñar un contador ascendente de 0 a 9 y también mostrarlo en el display del entrenador.
También aprendimos a usar cadenas de caracteres, están toman y almacenan varias variables enteras.
Para la creación de nuestra maquina expendedora tuvimos que emplear todos los conocimientos adquiridos en el transcurso del mes, al principio se nos dificulto pero con paciencia y esfuerzo se nos fue posible crear el programa.
Está de más resaltar la gran importancia y avance tecnológico que tiene hoy en día el lenguaje C al igual que los pic que salen al mercado y las grandes e interesantes cosas que podemos hacer con ellos.





































{kind=link}